地域交通の運転手不足や移動困難者の増加といった課題が深刻化する中、日立製作所 研究開発グループでは、社会インフラ事業で培った知見を生かし、自動運転車両の運行を支える管制システムの開発に取り組んでいます。モビリティ向けのフィジカルAIとデータ基盤を組み合わせることで、より実用的な運用の社会実装をめざし、現在、慶應義塾大学湘南藤沢キャンパス(SFC)にて実証実験を推進し、実用化に向けた検証を実施しました。
自動運転の社会実装にはどのような課題があり、どのように乗り越えていくべきなのでしょうか。実際に自動運転の研究開発や社会実装に向けたプロジェクトを推進している、慶應義塾大学 環境情報学部 大前 学 教授、産業技術総合研究所 情報・人間工学領域 研究企画室 橋本 尚久 研究企画室長、そして日立で、モビリティ分野の研究開発に取り組む研究者が一堂に会し、それぞれの立場から議論を交わしました。
自動運転を社会実装するためには?
長谷島:自動運転技術は実用化に向けて大きな期待が寄せられてきました。技術が進歩する一方で、社会実装に向けたみちのりはまだ遠く、地域では運転手不足や高齢化といった社会課題が確実に進行しています。社会実装の壁はどんな点にあるのでしょうか。
大前教授:日本ではSAE(Society of Automotive Engineers:米国自動車技術会)の基準に基づき、6段階で自動運転のレベルが定義されていますが、技術的な面でいうとレベル4(限定した地域など特定の条件での完全自動運転)までは、走行の範囲を限定することで比較的容易に到達可能ではないかと考えられてきました。それが過疎地などでの移動サービスとしての自動運転への期待と結びついていたのですが、実証実験を重ねる中で移動サービスの経済的持続性の課題がはっきりしてきました。

自動運転は技術レベルに応じて0〜5段階に区分されており、現在はレベル4までのシステムが一部エリアで認可されている(国土交通省の資料を参考に作成)
というのも、「移動したい」と思えるような元気な人たちは、さまざまな手段を使って移動できているんです。そのような人に自動運転を用意しても、従来の移動手段を変えてまで自動運転を利用する人は少ないのです。「移動したいが移動できない」という人は案外少なく、「移動できない」ほど体が弱ると、「移動したい」という気持ちもなくなり、自動運転を用意しても利用しないのです。また、そのような人たちにとっては、自動運転車で通院できるようにするよりも、遠隔医療などによって通院の必要性のなくす(移動の必要性を取り除くアプローチ)方が、より喜ばれるように見受けられます。自動運転のコストに対するニーズのボリュームについて、当初の想定が揺らいできているのではないでしょうか。

実証実験を通じて「移動困難者」に関する意外な実態が見えてきた、と語る大前教授
橋本さん:移動サービスの方は、コスト構造の問題も大きいです。以前は自動運転になれば運転手が不要になると考えられていましたが、実際には車内の安全管理など運転手が担っていた運転以外の役割が残るため、現状のままだと人件費はそこまで大きくは下がらず、交通事業者にとっての導入メリットも限定的であることが分かってきました。都市部のロボタクシーのように、収益が見込める領域では導入が進む可能性がありますが、過疎地では行政による支援なしには持続が難しいでしょう。技術以上に事業としてどう成立させるかが問われている段階に来ていると感じます。

自動運転を事業化する際のコスト面での課題について語る橋本さん
自動運転技術を社会インフラとして活用する
長谷島:事業化が難しいといった議論もある中で、自動運転技術を社会に生かすには、どのような方向性が考えられるでしょうか。
緒方:日立は、電力をはじめとする社会インフラを長年にわたり支える中で、各種設備から得られる情報を集約・統合し、全体を最適に制御する「管制システム」の知見を蓄積してきました。こうした考え方を、自動運転の分野にも応用できる可能性があると考えています。自動運転車には高性能なセンサーが搭載されており、取得されるデータは非常に高い精度を持っています。これらのデータを移動の制御にとどめず横断的に活用することで、新たな価値を生み出せるのではないかと考えています。たとえば、街の見守りやインフラの異常検知、設備の故障や劣化の予兆把握などに活用できれば、自動運転単体では成立しにくい事業性についても、複数の領域がコストを分担しながら、持続可能な形で移動サービスを支える仕組みを構築できる可能性があります。
大前教授:私も、データを収集する基盤としてのモビリティには大きな可能性があると思っています。一方で、それを実現するためには、膨大なデータをどのように扱うのか、通信や処理の仕組みも含めた全体設計が不可欠になるでしょう。
橋本さん:データ基盤が海外企業に握られてしまう可能性もある中で、日本としてどのように主導権を確保していくのかも重要な論点だと思います。また、自動運転に限らず、既存の車両から取得できるデータも含めて活用する視点が必要ではないでしょうか。

日立のもつ管制システムの知見を自動運転技術に生かしたい、と語る緒方
インフラと車両をどうマネジメントするか
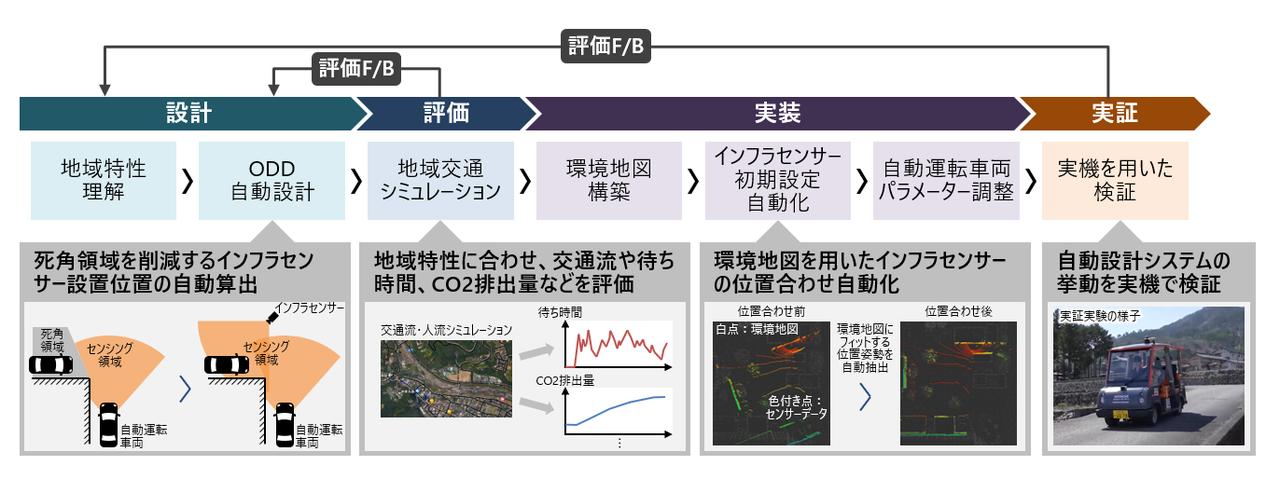
長谷島:日立は「次世代未来都市共創プロジェクト」として、日立市との協創で、スマートシティの実現をめざしたプロジェクトを行っています。プロジェクトの柱のひとつに「公共交通のスマート化」があり、慢性的な渋滞や、公共の交通手段がない「交通空白」地帯の対策を進めています。日立は、自動運転と人流データを用いたシミュレーションを元に、交通全体の改善を図る研究を進めています。その一環として、自動運転車両の安全な運行を支援するため、カメラやセンサーを道路(インフラ)側に設置し、車両に情報を提供する実証実験を行いました。道路周辺に設置して、交通情報や危険情報などを車両に提供するインフラセンサーについては、どんな難しさがあるのでしょうか。

日立市との協創プロジェクトの経験から、インフラ側の課題について問う長谷島
笹谷:これまで私は、監視カメラ映像から異常行動を検出するといった研究に携わってきましたが、自動運転に活用させるには、「異常を見つける」といっても求められるレベルの精度が異なります。死角にいる対象などを高精度かつ確実に捉えなければならず、求められる責任の水準が一気に上がります。そこが大きな課題だと感じています。
大前教授:自動運転にとってインフラは有力な支援手段ですが、精度を上げるのは容易ではありません。たとえば広い範囲を少ないセンサーで見ようとすると、遠方では位置や対象種別の認識精度がかなり落ちます。何かの拍子にセンサーの角度が少しずれるだけで、100メートル先では1車線ぐらいずれてしまうわけです。
また、無人運転を前提に運行する場合、インフラがシステムの一部として組み込まれます。そのため、インフラ側の一部に不具合が生じると、その時点で運行自体が停止してしまうリスクがあります。さらに、車両とインフラでは管轄や運用主体が異なることが多く、たとえばインフラ側の定期点検や機器交換のために電源を停止する場合でも、そのスケジュールが車両側の運行に直接影響してしまいます。有人運転であれば、人がその場で補完できるため大きな問題にはなりませんが、無人運転ではそうした柔軟な対応が難しい。こうした点を踏まえると、将来的にはインフラと車両を一体的にマネジメントできたり、少なくとも緊密に連携の取れる運用体制が不可欠になるのではないでしょうか。
緒方:ご指摘いただいた点は、とても重要だと思います。一方で、企業が単独で車もシステムも扱うのは実際には難しく、複数の企業が連携できる協創の仕組みや、データを束ねる共通基盤が必要だと感じます。だからこそ、自動運転のためだけではなく、地域全体で使えるインフラとして整えていくことで、持続可能な形にしていけるのではないでしょうか。

実証実験では慶應大学湘南藤沢キャンパス内にある自動運転バス路線をフィールドとして走行。生成AIを活用した運用管制の有効性を検証した
交通システムを支える「管制」のあり方
長谷島:いまは、インフラセンサーなどから集めた現場のデータを、自動運転車両へフィードバックし、道路全体の交通流の最適化へと還元する、いわゆる下り制御も含めた管制システムを実現したいと考えています。
笹谷:ここ湘南藤沢キャンパスで実証実験を進めましたが、私たちは車両そのものではなく、複数の自動運転車や一般車両を含めた全体の交通状況を見守り、最適に動かす「管制」にフォーカスしています。現在は大きく3つの領域に取り組んでいます。
1つ目がダイヤグラム管理です。地域の公共交通を前提に、定時性を担保するための運行調整で、インフラ事業で日立が培ってきた知見を生かしています。
2つ目がいわゆる「露払い」です。自動運転は環境のわずかな変化でも停止してしまうため、事前に走行ルートを走らせてデータを取得し、白線の劣化や路上障害物など、運行に影響する要因を検知・可視化するとともに、生成AIも活用し、異常を誰でも理解できる形で言語化する仕組みを開発しています。
3つ目が遠隔監視の高度化です。無人化が進んでも、安全管理・監視は不可欠ですが、1人が1台ずつ担当する方法では、運用の成立が困難です。複数台の状況を効率的に把握できるよう、映像やセンサーデータを統合、言語化することで少人数でのオペレーションを支援する技術開発に取り組んでいます。
今回の実証実験では、慶應大学SFCの環境を活用しながら、主にダイヤグラムの自動調整と露払いの検証を進めました。実際に実験車両を走らせると、障害物となる路上駐車などによる影響も多く、そうした環境要因をどう事前に捉え、ダイヤを乱さない運行に反映するかが重要なポイントだということが見えてきています。

管制システム研究の概要を、ダイヤグラム管理、事前走行によるデータ取得、遠隔監視の3つの観点から説明する笹谷
交通管制の可能性を広げるために
大前教授:遠隔監視に視覚言語モデル(VLM)を使うというアプローチ自体は、いろいろなところで試みられているので、どこで新しさを出すかという点には期待があります。むしろ気になるのは、いまの自動運転の研究が人間の延長に留まっていることです。ともするとベテランドライバーの再現に向かっているようにも見えるのですが、本来は機械だからこそ、もっと全体最適の挙動ができるはずなんですよね。
かつて「インテリジェント・スピード・アダプテーション(ISA)」と呼ばれる技術がありました。これは、住宅街などに進入すると道路側から信号が送られ、車両の最高速度が強制的に時速30kmに制限される仕組みです。この技術の面白いところは、すべての車両を制御しなくても交通全体に影響を与えられる点です。先頭の車両が速度制限を受けると、後続車は追い越すことができず、結果として車列全体の速度が自然と抑えられるからです。
つまり、一部の車両を制御することで、交通全体の挙動をコントロールできる可能性がある。この考え方は、自動運転や交通管制を考える上でも示唆的だと言えます。そういう意味では、先ほどの「露払い」のように環境側を整える発想も含めて、すべての車が賢くなくても成立する仕組みは非常に面白いと思います。

実証実験中の車内の様子。高精度なセンサーが、走行環境などの詳細な情報を集約していく
橋本さん:遠隔監視の実務で考えると、1人のオペレーターが何台の車両まで対応できるか、つまり1対Nがどこまで成立するかが大きな鍵になっています。現在の延長で人間と同じ責任を求めると、どうしても常時監視が必要になり、結局1対1に近づいてしまう懸念があります。これを乗り越えるには、異常検知などをシステム側にどこまで任せられるか、そして、そもそもの責任の持ち方をどう設計するかが重要です。日本は特に運転者の責任に比重が偏っていることが多いので、受容性や責任の考え方なども含めて見直していかないと事業としては成立しにくいでしょう。
緒方:現状のルールでは、レベル4の車両に対して外部から直接指示を出すことが難しく、できるのは基本的に「許可」までに限られます。ただ、本来めざしているのはインフラ側から全体を制御していく世界なので、その実現のためにも、技術だけでなく、ルールや制度も含めてアップデートしていく必要があると感じています。

遠隔監視の一場面。車載カメラやセンサーからの情報がモニターに刻々と映し出される
実証を通じて見えてきたモビリティの未来
笹谷:本日のお話の中で、特に一部の車両を起点に全体を調整するといった考え方は非常に示唆的でした。日立としても、車両とインフラの両方を見ながら価値を出していく可能性を見出しているところです。また、露払いのように環境側を整えるアプローチについても手応えを感じており、今後さらにブラッシュアップしていきたいと考えています。今回のような実証フィールドでの連携を通じて、インフラも含めた形で取り組みを広げていければと思います。
緒方:個人的には、いわゆるペースメーカーのように、一部の制御が全体の交通に影響を与えるという視点が印象的でした。自動運転車が増えていくことで、都市全体の交通のリズムを調整できる可能性がありそうです。地域が抱える渋滞や交通課題も、公共交通と一体で最適化していくことで解決につながる余地があると感じています。今後は複数台での実証を通じて、インフラと連携し全体を統括する管制システムの価値をより具体的に示していきたいですね。
橋本さん:人口減少などの課題も現実としてある中で、日立という強いプレイヤーと自治体が連携することで、移動に留まらず、健康や暮らしまで含めた都市のあり方を描いていけるのではないかと期待しています。ぜひ一緒に取り組ませていただければ幸いです。
大前教授:大学という立場から考えると、地域社会を支える移動サービスにどう貢献していくかが重要だと感じています。モビリティが地域全体に多様な価値をもたらすようになれば、公共的なインフラとして地域全体で支える仕組みも十分に考えられるでしょう。AIやサイバーフィジカル領域の進化を踏まえると、10年後には現在の自動運転の形そのものが前提ではなくなっている可能性もあります。たとえば、より高度な知能を持つヒューマノイドが車両を扱うことで、どんな車でも自律的に動かせるようになる未来も想像できます。そうした変化のスピードを踏まえると、車両そのものの高度化に留まることなく、より広い枠組みで移動や社会のあり方を捉えていくことが、これからは一層重要になるのではないかと感じています。
長谷島:まさに本日議論にあったような方向性について、私たちも検討を進めているところです。引き続き、共同研究も含めてご指導をいただきながら、より広い社会実装につなげていければと思います。本日はありがとうございました。

自動運転技術が新たな価値を生み出し、社会インフラとして地域課題の解決に貢献する――。そんな未来を感じさせる対談となった
プロフィール

大前 学
慶應義塾大学 環境情報学部 教授
兼 慶應義塾大学 大学院 政策・メディア研究科委員
2000年に東京大学大学院工学系研究科産業機械工学専攻を修了、博士(工学)取得。2000年に慶應義塾大学環境情報学部助手着任、2001年同専任講師、2005年同助教授、2013年同教授、現在に至る。専門は、機械力学、制御、自動車工学。主な研究テーマは、自動車の自動運転、隊列走行、遠隔操作における車両制御技術。

橋本 尚久
国立研究開発法人産業技術総合研究所
情報・人間工学領域 研究企画室 企画室長
筑波大学連携大学院准教授 東京理科大学連携大学院准教授
2005年産業技術総合研究所入所。2010年に米国オハイオ州立大学の訪問研究員、2019年に経済産業省 産業機械課へ出向などを経て現職。主にITS、自動運転システム、MaaS等の研究に従事。

緒方 健人
日立製作所 研究開発グループ Digital Innovation R&D モビリティ&オートメーションイノベーションセンタ
自律制御研究部 部長
2007年日立製作所入社。車載カメラを用いた運転支援・自動運転システムの研究開発に従事。2014-2016年自動車機器関連事業部へ出向し自動駐車システムの製品開発を担当。その後、鉄道、バス、ドローンなどのモビリティの自律化や交通を起点とするスマートシティに関する研究プロジェクトを推進。2021-2024年日立ヨーロッパR&D研究員。2026年より現職。

笹谷 聡
日立製作所 研究開発グループ Digital Innovation R&D モビリティ&オートメーションイノベーションセンタ
自律制御研究部 主任研究員
2012年日立製作所入社。画像や3次元点群の解析によるセンシング技術を中心に、監視カメラへの映像認識機能の組み込み・製品化、人間行動計測、異種センサー統合の研究開発に従事。その後、モビリティの自動・自律移動分野へ研究領域を拡大し、2025年度からは、都市・インフラ協調型による自動運転の社会実装に向けた研究開発を推進中。

長谷島 範安
日立製作所 研究開発グループ Digital Innovation R&D モビリティ&オートメーションイノベーションセンタ
自律制御研究部 主任研究員
2013年日立製作所入社。自動車の運転支援システムや自動運転システムの研究開発に従事。2015年~2016年には、自動駐車機能の製品化に向けて関連事業部と半同床での開発を経験。また、技術の横展開をめざし自律点検ロボットの研究開発にも従事。2025年からは、自動運転を使う側として都市との連携を実現すべく研究開発を推進中。